



ເຄື່ອງເປົ່າລົມເຄື່ອງກວດຈັບ PM2.5
ຄຸນສົມບັດເຄື່ອງເປົ່າລົມ
ຊື່ຍີ່ຫໍ້: Wonsmart
ຄວາມກົດດັນສູງທີ່ມີມໍເຕີ dc brushless
ປະເພດເຄື່ອງເປົ່າ: ພັດລົມ centrifugal
ແຮງດັນ: 220 VAC
Bearing: NMB ball bearing
ອຸດສາຫະກຳທີ່ນຳໃຊ້: ໂຮງງານຜະລິດ
ປະເພດກະແສໄຟຟ້າ: AC
ວັດສະດຸແຜ່ນ: ພາດສະຕິກ
ການຕິດຕັ້ງ: ພັດລົມເພດານ
ສະຖານທີ່ຕົ້ນກໍາເນີດ: Zhejiang, ປະເທດຈີນ
ການຢັ້ງຢືນ: ce, RoHS
ການຮັບປະກັນ: 1 ປີ
ບໍລິການຫຼັງການຂາຍໃຫ້: ສະຫນັບສະຫນູນອອນໄລນ໌
ໄລຍະເວລາຊີວິດ (MTTF): > 20,000 ຊົ່ວໂມງ (ພາຍໃຕ້ 25 ອົງສາ C)
ນ້ຳໜັກຄຳ: 886 ກຣາມ
ວັດສະດຸທີ່ຢູ່ອາໄສ: PC
ຊື່ຜະລິດຕະພັນ: PM2.5 blower ເຄື່ອງກວດຈັບ
ປະເພດມໍເຕີ: ສາມເຟດ DC Brushless Motor
ການຄວບຄຸມ: ພາຍນອກ
ຄວາມກົດດັນຄົງທີ່: 11kPa


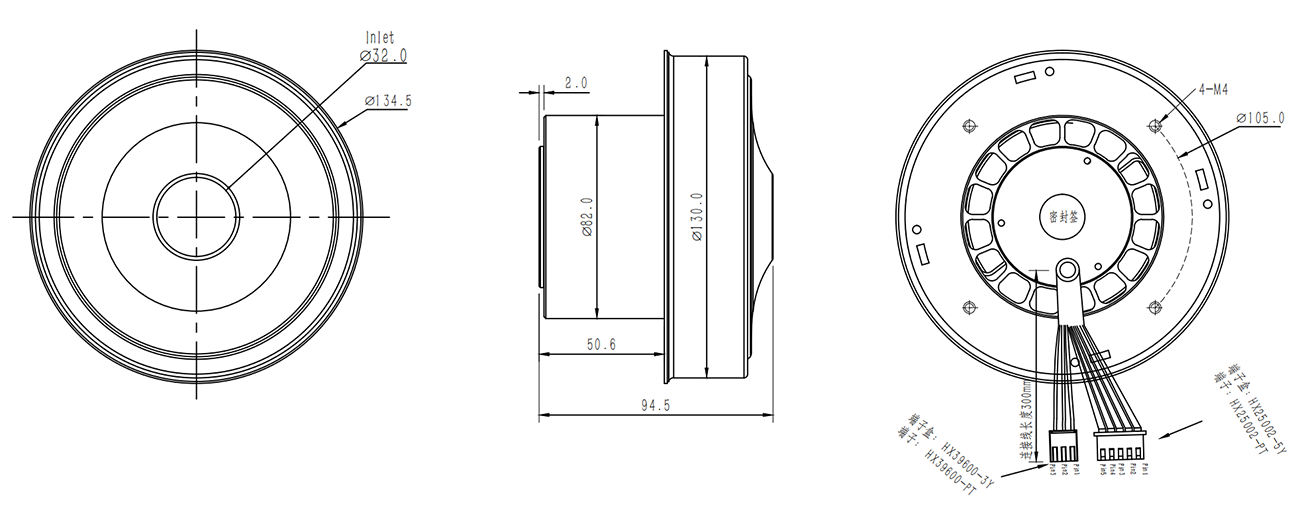
ການແຕ້ມຮູບ
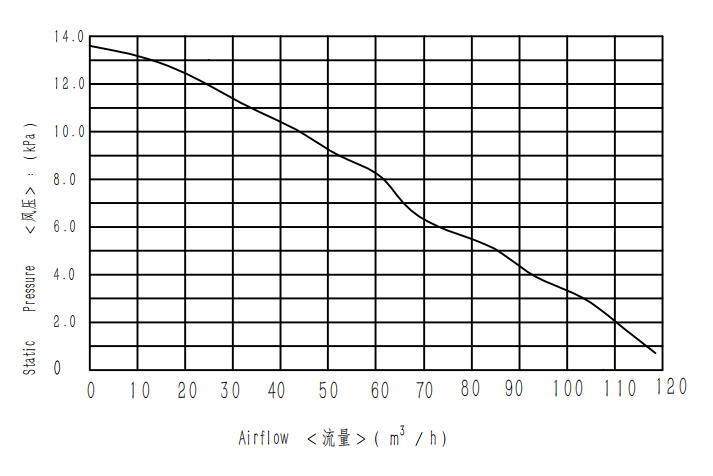
ປະສິດທິພາບເຄື່ອງເປົ່າ
ເຄື່ອງເປົ່າລົມ WS130120S-220-240-X300 ສາມາດບັນລຸກະແສລົມໄດ້ສູງສຸດ 95m3/h ທີ່ຄວາມກົດດັນ 0 kpa ແລະສູງສຸດ 11kpa ຄວາມກົດດັນຄົງທີ່. ມັນມີພະລັງງານອາກາດອອກສູງສຸດເມື່ອເຄື່ອງເປົ່າລົມນີ້ແລ່ນຢູ່ທີ່ຄວາມຕ້ານທານ 8.5kPa ຖ້າພວກເຮົາຕັ້ງ 100% PWM, ມັນມີປະສິດທິພາບສູງສຸດ. ໃນເວລາທີ່ເຄື່ອງເປົ່ານີ້ແລ່ນຢູ່ທີ່ຄວາມຕ້ານທານ 8.5kPa ຖ້າພວກເຮົາກໍານົດ 100% PWM. ຈຸດໂຫຼດອື່ນໆ ປະສິດທິພາບອ້າງອີງໃສ່ເສັ້ນໂຄ້ງ PQ ຂ້າງລຸ່ມນີ້:
ຂໍ້ໄດ້ປຽບ Brushless Blower DC
(1) WS130120S-220-240-X300 blower ມີ motors brushless ແລະ NMB ລູກ bearings ພາຍໃນທີ່ຊີ້ບອກເວລາຊີວິດຍາວຫຼາຍ; MTTF ຂອງເຄື່ອງເປົ່າລົມນີ້ສາມາດບັນລຸຫຼາຍກ່ວາ 15,000 ຊົ່ວໂມງທີ່ອຸນຫະພູມສະພາບແວດລ້ອມ 20 ອົງສາ C.
(2) ເຄື່ອງເປົ່າລົມນີ້ບໍ່ຕ້ອງການການດູແລ
(3) ເຄື່ອງເປົ່າລົມນີ້ຂັບເຄື່ອນໂດຍເຄື່ອງຄວບຄຸມ motor brushless ມີຫຼາຍຫນ້າທີ່ຄວບຄຸມທີ່ແຕກຕ່າງກັນເຊັ່ນ: ການຄວບຄຸມຄວາມໄວ, ຜົນຜະລິດກໍາມະຈອນຄວາມໄວ, ການເລັ່ງໄວ, ຫ້າມລໍ້ etc. ມັນສາມາດໄດ້ຮັບການຄວບຄຸມໂດຍເຄື່ອງອັດສະລິຍະແລະອຸປະກອນໄດ້ຢ່າງງ່າຍດາຍ.
(4) ຂັບເຄື່ອນໂດຍການຂັບລົດ brushless motor, blower ຈະມີໃນປັດຈຸບັນ, ພາຍໃຕ້ການ / ເກີນແຮງດັນ, ການປົກປັກຮັກສາຢຸດ.
ຄໍາຮ້ອງສະຫມັກ
ເຄື່ອງເປົ່າລົມນີ້ສາມາດຖືກນໍາໃຊ້ຢ່າງກວ້າງຂວາງໃສ່ເຄື່ອງດູດຝຸ່ນ, ເຄື່ອງເກັບຂີ້ຝຸ່ນ, ເຄື່ອງປິ່ນປົວຊັ້ນ.
ວິທີການໃຊ້ Blower ຢ່າງຖືກຕ້ອງ
ເຄື່ອງເປົ່າລົມນີ້ສາມາດແລ່ນໄດ້ທີ່ທິດທາງ CCW ເທົ່ານັ້ນ.ປີ້ນທິດທາງການແລ່ນຂອງ impeller ບໍ່ສາມາດປ່ຽນທິດທາງອາກາດໄດ້.
ການກັ່ນຕອງໃສ່ຊ່ອງສຽບເພື່ອປົກປ້ອງເຄື່ອງເປົ່າຈາກຝຸ່ນແລະນ້ໍາ.
ຮັກສາອຸນຫະພູມສິ່ງແວດລ້ອມໃຫ້ຕໍ່າເທົ່າທີ່ເປັນໄປໄດ້ເພື່ອເຮັດໃຫ້ເຄື່ອງເປົ່າລົມດົນກວ່າ.
FAQ
ຖາມ: ພວກເຮົາສາມາດໃຊ້ເຄື່ອງເປົ່າລົມ centrifugal ນີ້ເພື່ອດູດນ້ໍາໄດ້ບໍ?
A: ພັດລົມນີ້ບໍ່ສາມາດໃຊ້ເພື່ອດູດນ້ໍາໄດ້. ຖ້າທ່ານຕ້ອງການດູດນ້ໍາ, ທ່ານສາມາດຂໍໃຫ້ພວກເຮົາເລືອກລາຍການທີ່ເຫມາະສົມສໍາລັບເງື່ອນໄຂການເຮັດວຽກພິເສດນີ້.
ຖາມ: ພວກເຮົາສາມາດໃຊ້ເຄື່ອງເປົ່າລົມ centrifugal ນີ້ເພື່ອດູດຝຸ່ນໂດຍກົງບໍ?
A: ພັດລົມ blower ນີ້ບໍ່ສາມາດຖືກນໍາໃຊ້ເພື່ອດູດຝຸ່ນໂດຍກົງ. ຖ້າທ່ານຕ້ອງການດູດຝຸ່ນ, ທ່ານສາມາດຂໍໃຫ້ພວກເຮົາເລືອກລາຍການທີ່ເຫມາະສົມສໍາລັບສະພາບການເຮັດວຽກພິເສດນີ້.
Q: ສິ່ງທີ່ສາມາດເຮັດໄດ້ຖ້າສະພາບການເຮັດວຽກແມ່ນເປື້ອນ?
A: ການກັ່ນຕອງແມ່ນແນະນໍາໃຫ້ປະກອບໃສ່ກັບ inlet ຂອງພັດລົມ blower ໄດ້
Brushless DC motor ລະບົບ AC servo ກໍາລັງພັດທະນາຢ່າງໄວວາເນື່ອງຈາກ inertia ຂະຫນາດນ້ອຍຂອງມັນ, ແຮງບິດຜົນຜະລິດຂະຫນາດໃຫຍ່, ການຄວບຄຸມງ່າຍດາຍແລະການຕອບສະຫນອງແບບເຄື່ອນໄຫວທີ່ດີ. ມັນມີຄວາມສົດໃສດ້ານຄໍາຮ້ອງສະຫມັກຢ່າງກວ້າງຂວາງ. ໃນພາກສະຫນາມຂອງປະສິດທິພາບສູງແລະຄວາມແມ່ນຍໍາສູງ servo drive, ມັນຈະຄ່ອຍໆທົດແທນລະບົບ servo DC ແບບດັ້ງເດີມ. ຢ່າງໃດກໍຕາມ, torque ripple ຍັງມີຢູ່ໃນ BLDC, ເຊິ່ງບໍ່ສາມາດບັນລຸການຄວບຄຸມຕໍາແຫນ່ງເພີ່ມເຕີມແລະການຄວບຄຸມຄວາມໄວການປະຕິບັດທີ່ສູງຂຶ້ນ. ໄລຍະການປ່ຽນແປງໃນປັດຈຸບັນແມ່ນຫນຶ່ງໃນເຫດຜົນຕົ້ນຕໍສໍາລັບການ torque ripple.
ໃນລະບົບ AC servo ທີ່ມີຂໍ້ສະເຫນີແນະໃນປະຈຸບັນທີ່ບໍ່ແມ່ນໄລຍະ commutating, ripple torque commutating ຄວາມໄວຕ່ໍາສາມາດຄວບຄຸມໄດ້, ແຕ່ມັນບໍ່ສາມາດຄວບຄຸມໄດ້ໃນສະຖານະການທີ່ມີຄວາມໄວສູງ, ໄລຍະທີ່ບໍ່ແມ່ນການປ່ຽນແປງແມ່ນບໍ່ສາມາດຄວບຄຸມໄດ້. ດັ່ງນັ້ນ, ມັນຈໍາເປັນຕ້ອງຊອກຫາໂຄງການ commutation ທີ່ດີທີ່ສຸດເພື່ອບັນລຸການປະຕິບັດ torque commutation ທີ່ດີກວ່າ.
ລັດສະຫຼັບປະສິດທິພາບຂອງ inverter ໃນຂະບວນການ commutation ຄວນໄດ້ຮັບການຄັດເລືອກຕາມກົດລະບຽບ.
ກົດລະບຽບ 1: ປະຕິບັດຕາມຕໍາແຫນ່ງ rotor ໃນປັດຈຸບັນ, ນັ້ນແມ່ນ, ປິດສະຫຼັບທີ່ສອດຄ້ອງກັນຄວນຈະຫາຍໄປ, ແລະສະຫວິດທີ່ສອດຄ້ອງກັນຄວນໄດ້ຮັບການສ້າງຕັ້ງຂຶ້ນ.
ກົດລະບຽບ 2: ພາຍໃຕ້ກົດລະບຽບ 1, ການຄວບຄຸມດຽວແລະ bipolar ສາມາດຖືກນໍາໃຊ້.
ກົດລະບຽບ 3: ອະນຸຍາດໃຫ້ປິດການຊັກຊ້າຂອງສະວິດທີ່ສອດຄ້ອງກັນ.
ຂໍ້ດີ ແລະ ຂໍ້ບົກພ່ອງຂອງຍຸດທະສາດການຄວບຄຸມສະວິດພາຍໃຕ້ສະຖານະການປ່ຽນແປງແມ່ນຖືກປະເມີນໂດຍສອງດັດຊະນີຕໍ່ໄປນີ້:
1.torque pulsation ທີ່ເກີດຈາກ commutation ເປັນຂະຫນາດນ້ອຍເທົ່າທີ່ເປັນໄປໄດ້ (ບໍ່ແມ່ນ commutation ປະຈຸບັນ pulsation ຂະຫນາດນ້ອຍເທົ່າທີ່ເປັນໄປໄດ້).
2. ຫຼຸດເວລາເຄື່ອນທີ່ເທົ່າທີ່ເປັນໄປໄດ້.



